桁架結構機械手,更適用于大批量生產的需求
引言:桁架結構的機械手通常采用的是龍門式框架,沿直角坐標系移動,適用于大批量生產加工。那么,今天我們就來認識一下桁架結構機械手吧。
近幾年來,機床行業發展迅速,技術水平有了很大的提高,與國外的差距變得越來越小,尤其是加工中心機床開始引用桁架機械手后發展速度飛快。采用桁架機械手輸送的柔性加工自動線,可以大大提高數控企業的生產效率,推動由桁架結構機械手輸送的柔性加工自動線發展。
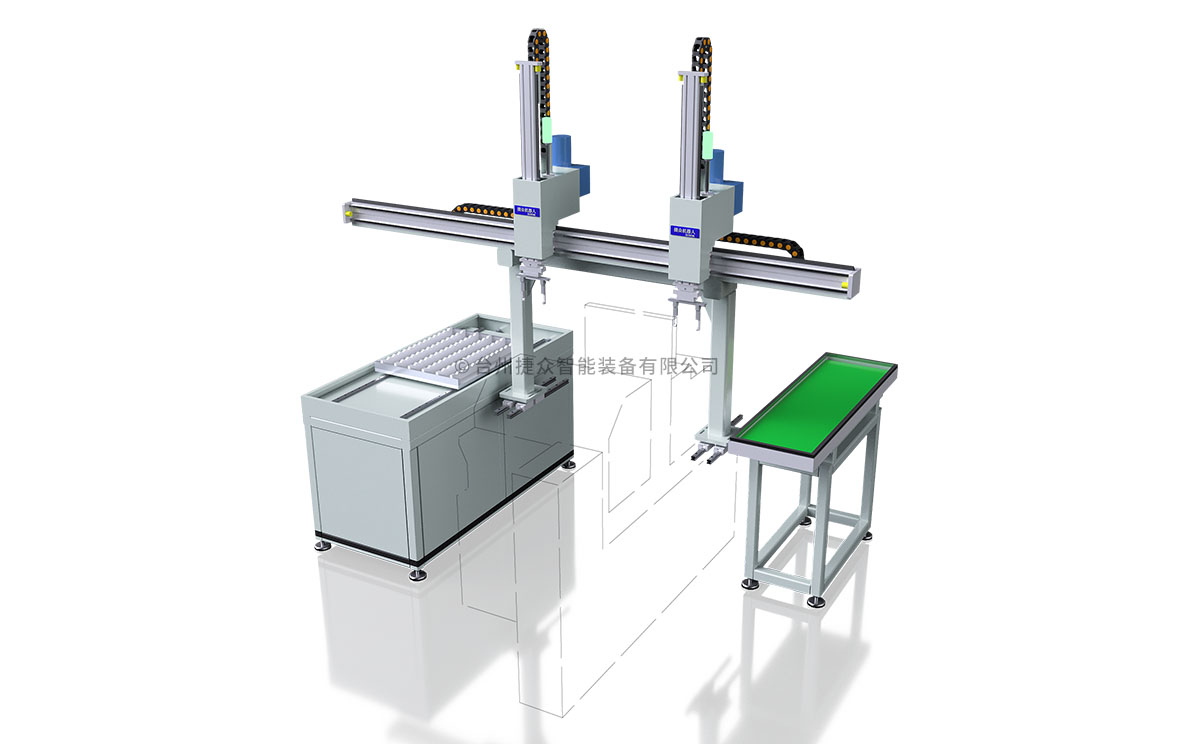
桁架機械手主要實現機床制造過程的完全自動化,并采用了集成加工技術,適用于生產線的上下料、工件翻轉、工件轉序等。桁架機械手由主體、驅動系統和控制系統三個基本部分組成。按機器人結構分類為直角坐標型,機械手沿二維直角坐標系移動。

桁架機械手結構
主體部分通常采用龍門式結構,由y向橫梁與導軌、z向滑枕、十字滑座、立柱、過渡連接板和基座等部分組成,z向的直線運動皆為交流伺服電動機通過蝸輪減速器驅動齒輪與y向橫梁、z向滑枕上固定的齒條作滾動,驅動移動部件沿導軌快速運動。
移動部件為質量較輕的十字滑座和z向滑枕,滑枕采用由鋁合金拉制的型材。橫梁采用方鋼型材,在橫梁上安裝有導軌和齒條,通過滾輪與導軌接觸,整個機械手都懸掛在其上。
桁架機械手的控制核心通過工業控制器(如:PLC,運動控制,單片機等)實現。通過控制器對各種輸入(各種傳感器,按鈕等)信號的分析處理,做出一定的邏輯判斷后,對各個輸出元件(繼電器,電機驅動器,指示燈等)下達執行命令,完成X,Y,Z三軸之間的聯合運動,以此實現一整套的全自動作業流程。
桁架結構機械手
在國內的機械加工,目前很多都是使用專機或人工進行機床上下料的方式,但是隨著社會的進步和發展,科技的日益進步,產品更新換代加快,專機和人工有很多不足,占地面積大,柔性不夠,生存效率低下,等等已經不能滿足大批量生產的需求。

由于桁架結構的機械手輸送的速度快,加速度大,加減速時間短。當輸送較重的工件時,慣量大,因此,伺服驅動電機要有足夠的驅動和制動的能力,支撐元件也要有足夠的剛度及強度。只有這樣,才能使伺服電機滿足桁架機械手輸送的高響應、高剛度及高精度要求。
在選擇合適伺服電機的情況下,根據物料運動的距離和運行節拍,計算出伺服系統的位移和軌跡,對驅動器PID參數進行動態調整。桁架機械手根據接收到的位移、速度指令,經變化、放大并調整處理后,傳遞給運動單元,通過光纖傳感器對運行狀態進行實時檢測,在高速搬運過程中,運動部件在極短的時間內到達給定的速度,并能在高速行程中瞬間準停,通過高分辯率絕對式編碼器的插補運算,控制機械誤差和測量誤差對運動精度的影響。
由于被輸送的工件不同,質量也不同,因此,桁架機械手有多種規格和系列。在選擇時,根據被輸送工件的質量,加工的節拍來選取。但機械手的手臂,夾持方式,則根據被輸送工件的形狀、結構及機床夾具定夾方式來設計。
通過上文,相信大家對于桁架結構的機械手有了更進一步的了解。在桁架結構機械手上,我們可以發現它更適用于大批量生產加工的產品,在輸送更高要求的產品時,需要更多符合相應條件的配置及方案。對于桁架結構機械手上有任何疑問的,歡迎來咨詢我們專業的桁架機械手研發制造團隊。